Brainless but coordinated - decentralized neural dynamics and sensory constraints shape brittle star locomotion
Researchers: Dries Marzougui, Dominique Adriaens, Francis wyffels
Overview of the in-silico brittle star framework and analysis dashboard.
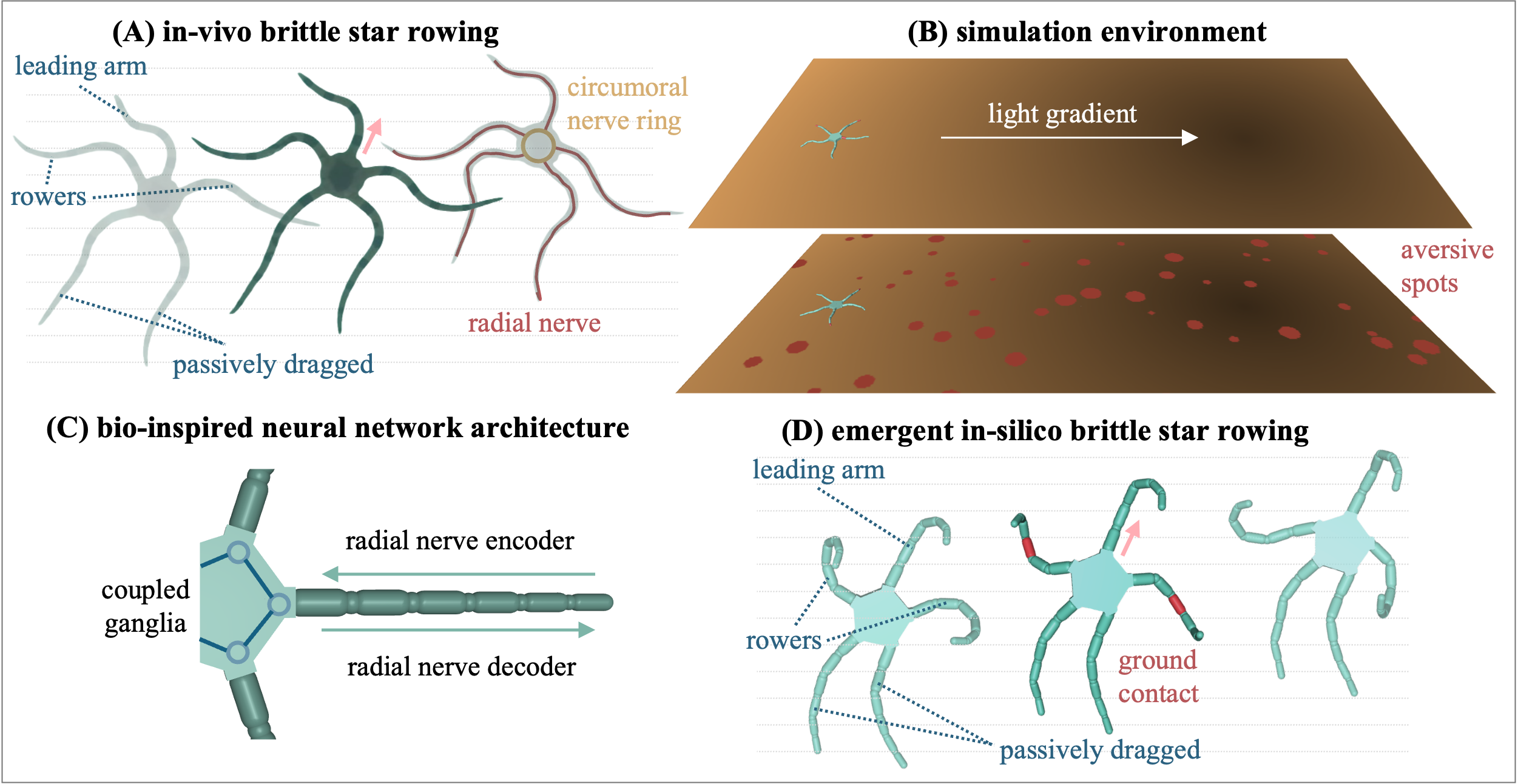
Brittle stars move with remarkable whole-body coordination despite lacking a central brain. With five identical arms radiating from a central disk, they predominantly adopt a bilaterally symmetrical rowing gait: one arm leads, two neighboring arms row in synchrony, and the remaining arms trail. This raises a puzzle: how does a brainless nervous system generate coherent whole-body gaits, and why does it favor rowing? To address this, this work introduces an in silico framework combining (1) a 3D model of brittle star morphology in a physics simulator, (2) an artificial neural network architecture that mirrors the decentralized arm-level ganglia which interconnect through the nerve ring, and (3) reinforcement learning to optimize controllers for locomotion. Analysis of optimized controllers shows that ganglia behave as distributed oscillators whose coupling through the nerve ring yields synchronization, analogous to central pattern generators. Gait analysis reveals that rowing emerges as the strategy most compatible with the arms’ dual role as effectors and sensors. Taken together, these results provide a mechanistic view on how decentralized neural dynamics and sensory constraints shape brittle star locomotion. The presented framework offers an open-ended testbed for hypotheses inaccessible in vivo, and more broadly, for exploring decentralized control in embodied agents.
This interactive dashboard complements the paper by allowing readers to explore all results in detail. The Run analysis page provides access to individual optimization runs, including videos, metrics, and neural dynamics. The Scenario comparison page displays all optimization runs for each training condition side by side, allowing visual inspection of behavioral diversity and consistency.
🔍 Click below to explore the controllers and their behaviors interactively: