Robot Helpers for Your Business
Collaborative robots that learn to handle your most challenging objects
We help companies automate tasks that standard robots cannot handle: deformable, fragile, or unpredictable objects in dynamic environments.

We bring collaborative robots from the lab to your workspace. Our robot butler demo was featured on VRT News.
Our work has been featured in VRT NWS, De Morgen, and De Standaard and multiple podcasts.
The challenge
Your production line, laboratory, or warehouse handles objects that vary in size, shape, and material. Your operators perform tasks that change regularly. Traditional automation (purpose-built machines for a single repetitive task) cannot keep up: the objects are too varied, the environment too dynamic, the tasks too diverse.
Collaborative robots promise to close this flexibility gap, but most still fail on anything beyond pick-and-place of rigid objects. Deformable materials, transparent surfaces, fragile samples, and human-occupied environments remain out of reach for standard robotic systems.
Our approach
We build collaborative robot setups that learn manipulation tasks from data. Instead of programming every motion for every object, we train robots to perceive, grasp, and handle objects by learning from examples. Our in-house sensing technology, including tactile fingertips and smart textiles, gives robots the feedback they need to handle difficult objects safely.
We operate between Technology Readiness Level 1 and 6: from fundamental research to validated proof of concept in a realistic environment. We are not a system integrator; we are a research partner that solves the manipulation problems integrators cannot yet solve.
What we offer
Explorative studies. We assess the feasibility of automating your specific task with collaborative robots, and deliver a written report with a clear go/no-go recommendation.
Proof-of-concept setups. We build a working robot demonstration in our lab, tailored to your objects, environment, and workflow, complete with customer-specific software and documentation.
Knowledge transfer. We train your engineering team on the methods and tools behind the proof of concept, enabling you to continue development independently.
Research partnerships. For longer-term challenges, we co-design and co-execute funded research projects (VLAIO, ICON, EU) with your company as a partner.
Research portfolio map. We help you prioritize SOTA robotics projects at your workplace by assisting in robotics roadmaps and timelines.
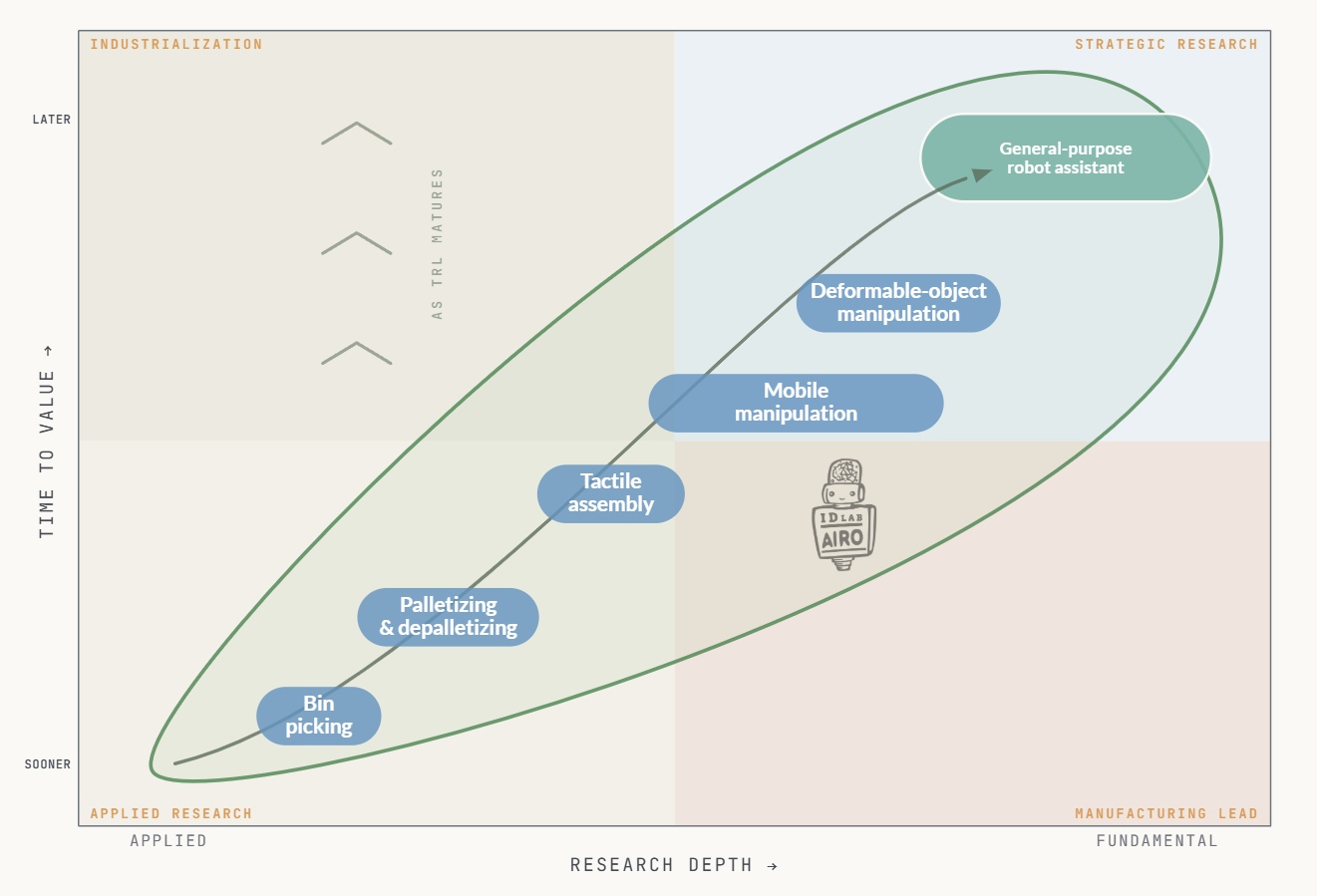
Robotics & AI research portfolio map to help you structure robotics innovations at your workplace. Our group offers both short-term direct collaborations for direct deployment of smart robots and long-term research collaborations.
Proof points
Each proof point combines peer-reviewed research methods with system integration tailored to the deployment setting. We test on previously unseen objects under varied lighting, instances, and human activity, and report failure rates as a primary metric.
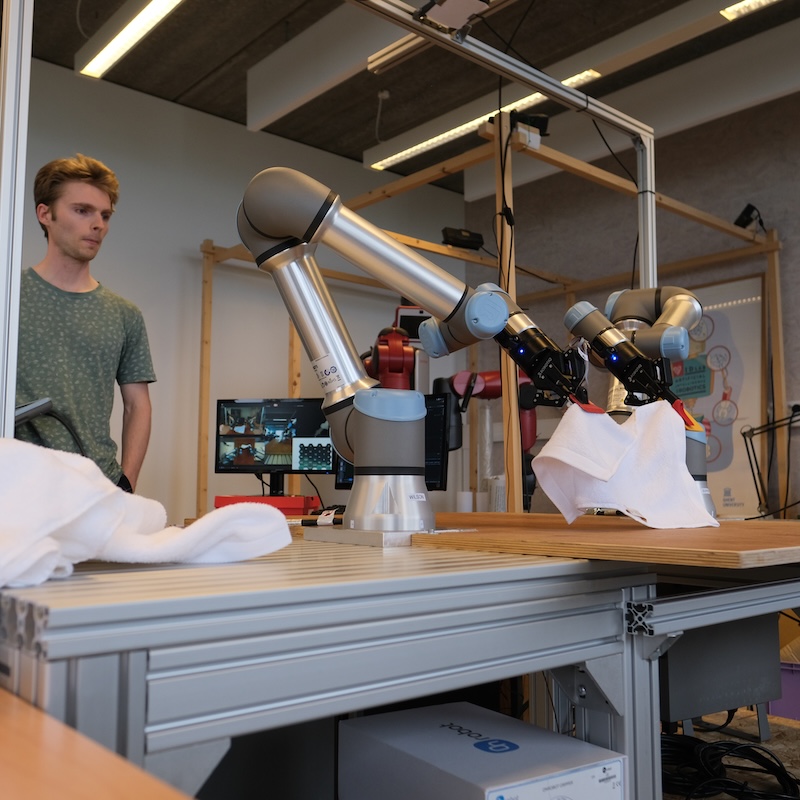
Cloth manipulation: two-time world champion (IROS'22, ICRA'23). Folds unseen garments in under two minutes using AI perception and tactile sensing.

Robot bartender: fully autonomous drink service. 0.7% failure rate on unseen glassware. Featured on VRT News.

Lab assistant: autonomous sample handling in a biotech wet lab, including centrifuge loading, pipetting, and transfers of fragile biological material.
From your challenge to our robot
- You describe the task. What objects, what actions, what environment?
- We assess feasibility. We like to visit your facility, observe the task in context, and ask: is this automatable with current technology? What sensing and learning approach is needed?
- We build a proof of concept. A working robot setup in our lab, with your objects and your constraints.
- You evaluate. We demonstrate live. You assess fit with your workflow.
- Next steps. Scale-up, a funded R&D project, or handoff to an integration partner.
Why us
IDLab–AIRO is the AI and Robotics lab of Ghent University and imec.
- Embedded in a research group of 350+ scientists with 500+ active industry collaborations.
- Team of 30+ researchers covering machine learning, robotic manipulation, sensor design, and learning from humans.
- Two-time winners of the world’s largest robotic cloth-manipulation competition (IROS 2022, ICRA 2023).
- Featured in national and international media, including VRT NWS, De Morgen, and De Standaard.
- We publish in top journals (Science Robotics, International Journal of Robotics Research) and present at tier-1 conferences such as ICRA.
- Open-source codebase and in-house hardware ecosystem for fast development and testing of sensor technologies for robots.
Contact
Andreas Verleysen, PhD (Senior Robotics Engineer) andreas.verleysen@imec.be
Francis wyffels, PhD (Professor Robotics & AI) francis.wyffels@ugent.be

Andreas Verleysen and Francis wyffels, your contact points for industry collaboration.