Bio-inspired Computing and Robotics
About this research line
We explore unconventional computing paradigms and bio-inspired robot design to achieve faster, more efficient, and more adaptive robotic intelligence.
Deep learning relies on ever-larger networks that are both data-hungry and power-hungry. Biological systems achieve more with less: less data, less energy, and faster responses. We investigate computing paradigms beyond conventional digital neural networks for three reasons. First, learning efficiency: enabling robots to acquire skills from fewer examples. Second, energy efficiency: bringing intelligence closer to the hardware through analogue, photonic, and neuromorphic substrates. Third, reactive control: giving robots fast reflex loops alongside slower deliberative reasoning, as biological nervous systems combine spinal reflexes with cortical planning.
Bio-inspired robotics is also a space for curiosity-driven research. Studying biological systems with no obvious engineering application, such as seahorse tails or plant physiology, has consistently produced insights we could not have planned for.
Unconventional computing
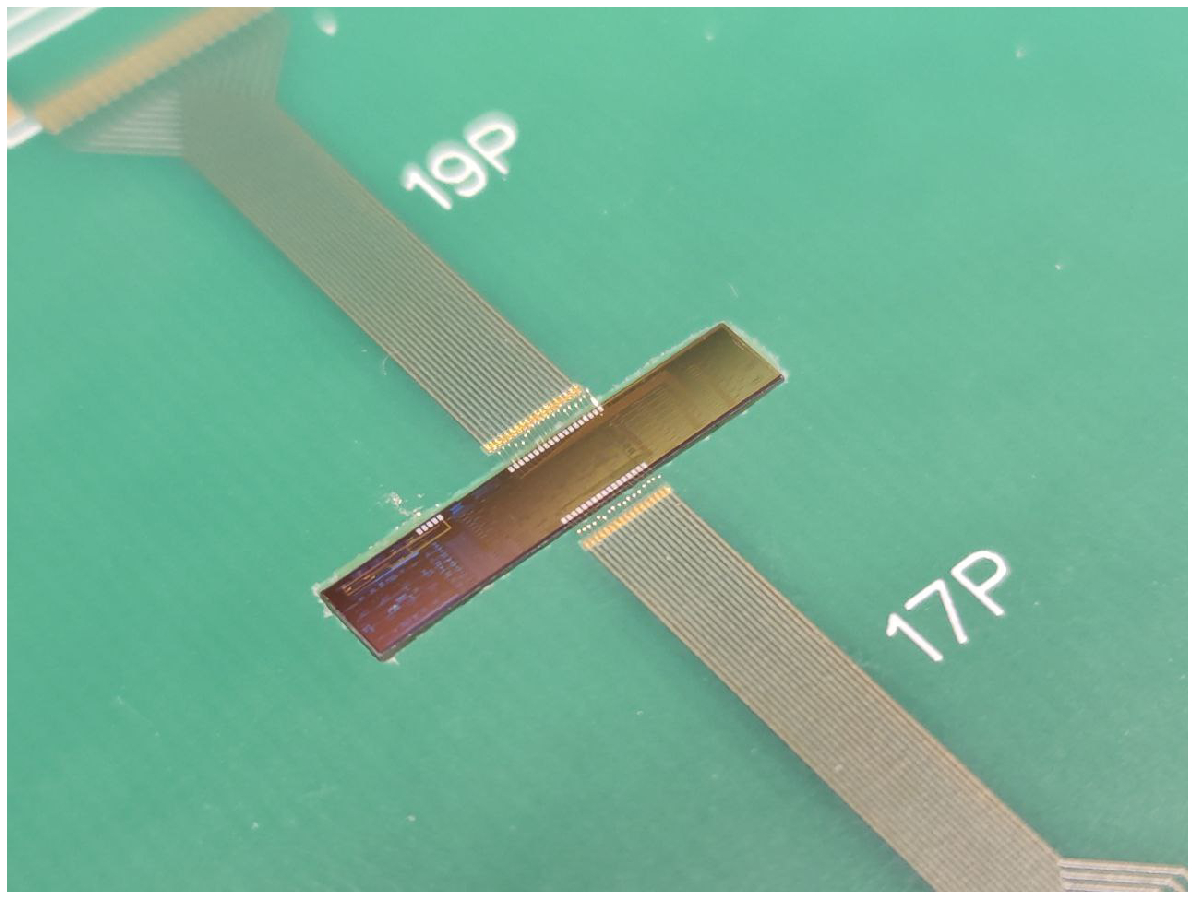
In reservoir computing, the complex dynamics of a high-dimensional system transform inputs into representations from which a simple readout extracts useful signals. The reservoir need not be a digital simulation: it can be a photonic chip, a compliant robot body, or a living plant. We have explored several such substrates. Living strawberry plants, for example, reconstruct environmental variables and eco-physiological states from leaf-thickness sensors alone, with no external power supply, no digitisation, and no explicit model. Plants illustrate how far a computational substrate can be pushed: a medium that simultaneously senses its environment and processes information through its own physiology.
The same principle of letting physical dynamics carry the computation underpins our work on hardware-close neural networks. Spiking neural networks run on neuromorphic hardware at a fraction of the energy cost of conventional GPUs, and their event-driven nature fits real-time sensory processing. Analogue computing paradigms that exploit the natural dynamics of physical systems offer sensor processing without digitisation and inference without heavy compute.
These architectures raise a parallel question about learning. Local learning rules train networks from signals available at each synapse instead of a global error signal, which makes them a natural fit for neuromorphic and analogue hardware where backpropagation is hard to implement. Examples include Hebbian rules, equilibrium propagation, and target propagation. Probabilistic paradigms including p-bit neural networks, where stochastic devices encode computation in noise itself, suggest further routes to energy-efficient inference and sampling.
Photonic reservoir computing chip.
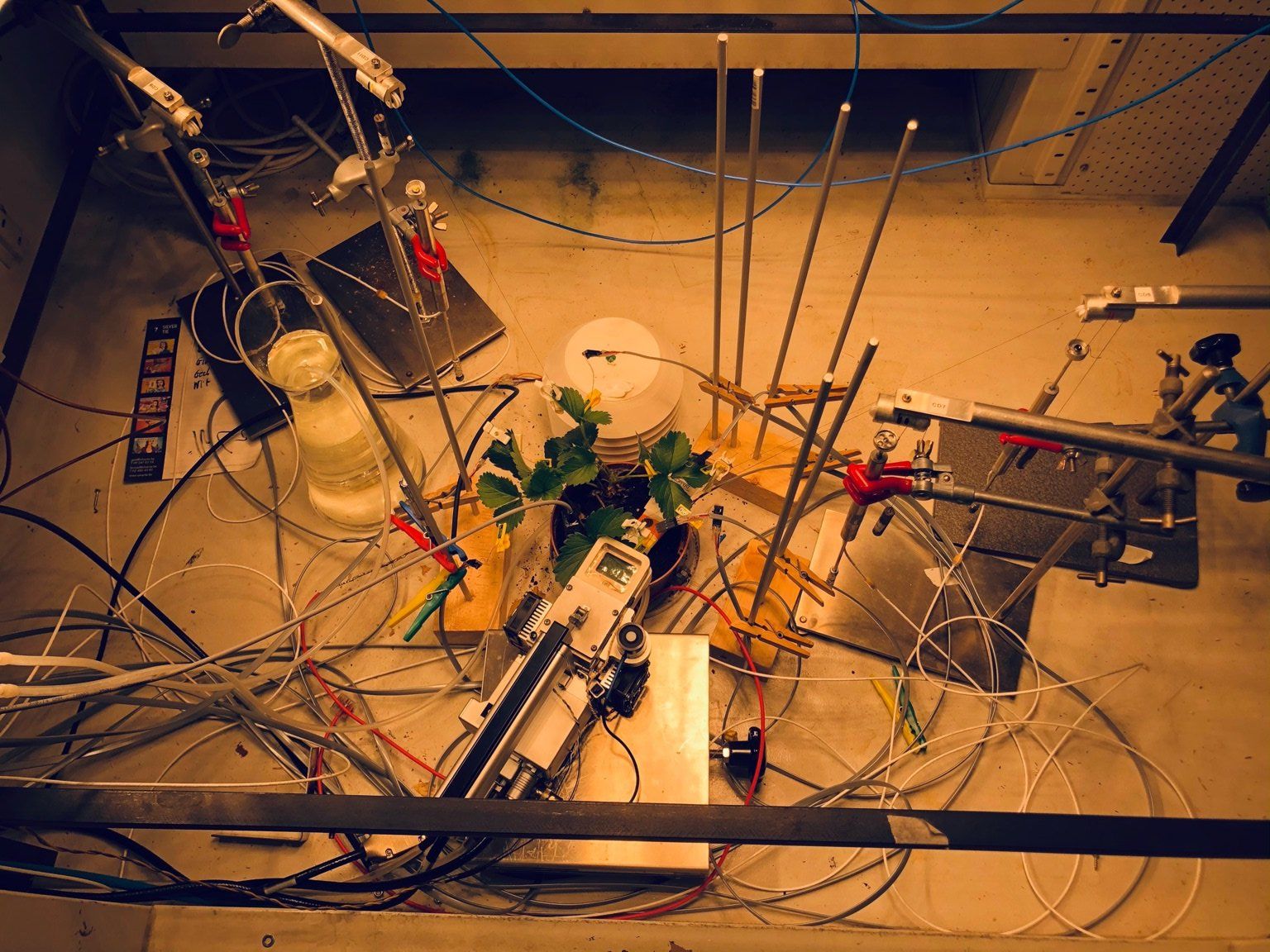
Living strawberry plants as physical reservoirs: leaf-thickness sensors serve as readout channels.
Fast and slow control
Biological locomotion combines fast spinal reflexes with slower cerebellar adaptation and cortical planning. We bring this layered architecture to robots. At the fast loop, spiking neural networks drive central pattern generators that produce stable gaits and recover from perturbations within milliseconds. At the slower loop, cerebellum-inspired internal models learn to predict and compensate for the body’s dynamics, maintaining target locomotion frequency and resisting disturbances more effectively than purely reactive controllers.
This separation of timescales connects the body, the controller, and the computing substrate. A compliant robot body absorbs perturbations the fast loop never needs to handle, while the slow loop adapts to gradual changes in terrain or load. We test these architectures on our compliant quadruped platforms, where spiking reservoirs and reflex-based neural networks achieve stable closed-loop locomotion using only body-mounted sensors as input.
Compliant robot bodies
Compliant actuators and flexible structural elements reduce controller complexity and improve energy efficiency. Our Tigrillo platform demonstrated that compliant gaits are more robust to parameter variations and more energy-efficient than their stiff counterparts. Tigrillo is the latest in a line of increasingly capable compliant quadrupeds we have developed over the past decade, each informing the design rules that link body mechanics to locomotion performance.
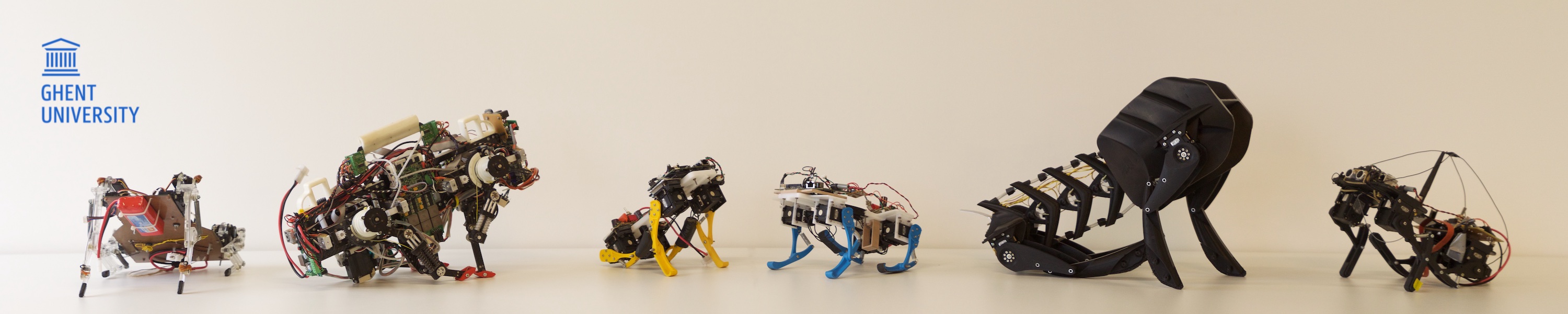
Over the past decade we developed increasingly sophisticated compliant quadrupeds. From left to right: Reservoir Dog, Oncilla, Spyro 1 & 2, M.A.R.C. and Tigrillo.
We also study biological morphologies (e.g., brittle stars, seahorse tails, jumping spiders) to inform robot design, with the aim of developing new gripper and manipulator concepts for the robot helper team. In recent work, we modelled the muscle architecture of the seahorse tail, where muscles span up to eleven vertebral segments, using musculoskeletal simulation in MuJoCo and validated the results with 3D-printed prototypes. The seahorse tail is a prehensile grasping system with no equivalent in current robotics, and its mechanics suggest new principles for compliant gripper design.

Musculoskeletal model and 3D-printed prototype of the seahorse prehensile tail.
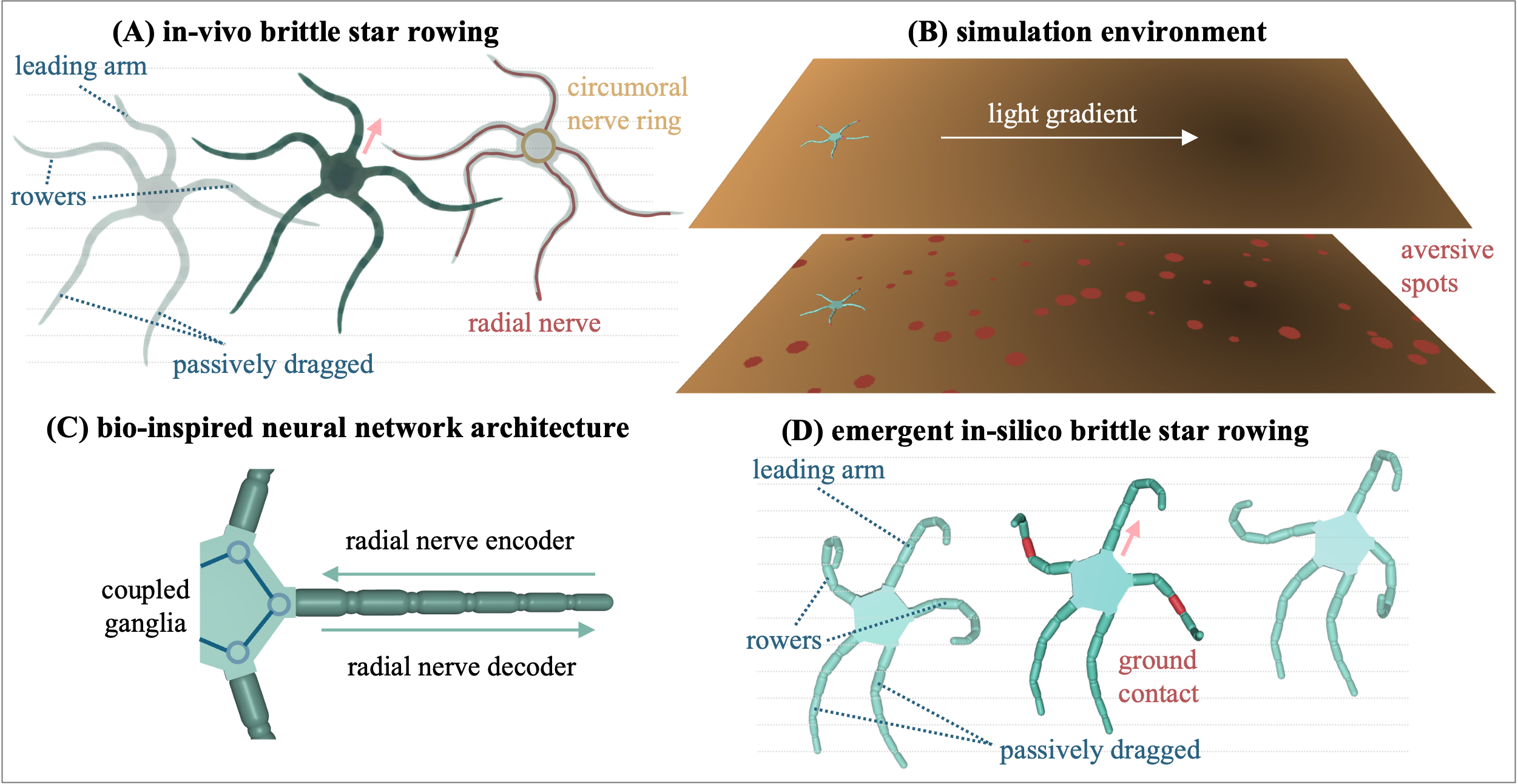
Simulation of brittle-star morphology and locomotion.
Active researchers
- Prof. Francis wyffels, PhD
- Prof. Joni Dambre, PhD
- Dries Marzougui, PhD
- Danial Forouhar
- Matthias Pex
- Sven Van Geyt