AI for Agriculture & Plant Science
About this research line
We develop AI-driven sensing and computing for plant science and agriculture.
Our work in this domain combines custom sensor platforms, AI-based detection and segmentation, and simulation tools for crop modelling. This connects our robotics and machine learning expertise with agriculture, forestry, and fundamental plant biology.
Sensing and phenotyping
We design sensor systems that capture plant and environmental state across modalities. MIRRA is our modular, cost-effective microclimate monitoring system for real-time remote applications, combining multiple environmental sensors in a compact, low-power package deployable in forests, greenhouses, and open fields. In collaboration with UGent-Woodlab, we developed a high-throughput pipeline for quantitative wood anatomy that pairs gigapixel macro photography with YOLOv8-based segmentation of tree ring vessels and rays, bringing automated analysis to a field that has relied on manual microscopy.

MIRRA: modular microclimate monitoring for real-time remote field and forest applications.
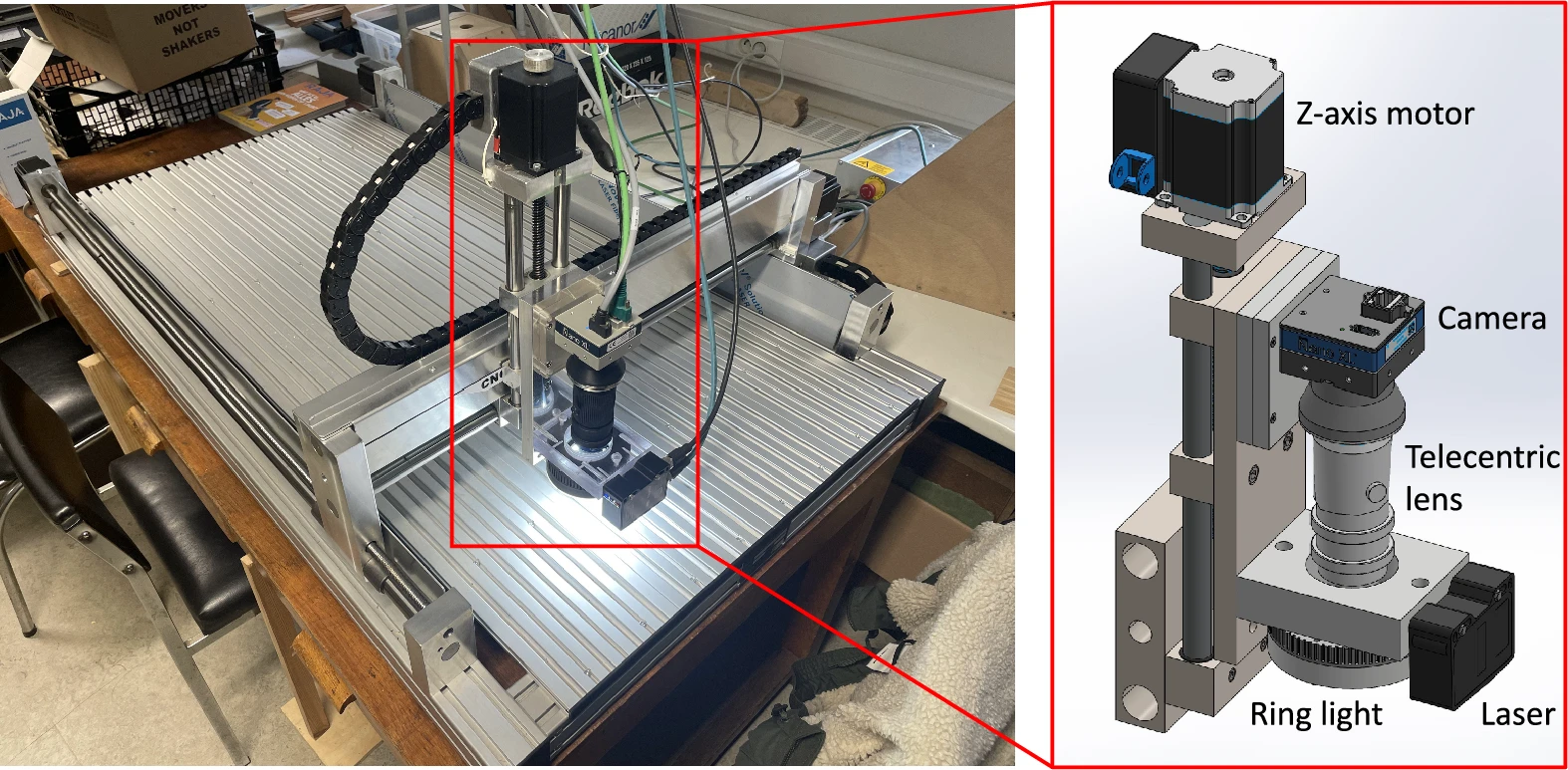
Gigapixel imaging and deep learning segmentation for quantitative wood anatomy.
Detection and segmentation for plant biology
Across our work in plant biology and agriculture, AI-based detection and segmentation provide a common toolkit. For example, we developed stomata detection on leaf microscope images for plant physiology research; the same work was reused for the KIKS project at Dwengo, illustrating how applied research can also unlock educational outreach.

Stomata detection on a leaf microscope image.
As another example, in collaboration with Meise Botanic Garden and KU Leuven we analysed the agro-morphological diversity of 70 Robusta coffee genotypes from the Yangambi collection in the Democratic Republic of the Congo, identifying promising genotypes for green bean quality and drought tolerance.
The broader aim is to make image-based phenotyping and physiological measurement scalable across species, traits, and field conditions.
Simulation intelligence for crop science
Simulation intelligence merges scientific computing with AI through interconnected motifs: surrogate modelling, agent-based modelling, differentiable simulation, probabilistic programming, causal inference, and program synthesis. We survey how these motifs advance plant and crop modelling, from molecular processes to ecosystem management. Surrogate modelling, agent-based approaches, and differentiable programming already have concrete plant science applications. Others, such as open-ended optimisation and probabilistic programming, remain largely unexplored in this domain.
Collaborations
We collaborate with ILVO (Flanders Research Institute for Agriculture, Fisheries and Food), Meise Botanic Garden, INERA Yangambi (DRC), and the Department of Data Analysis and Mathematical Modelling at Ghent University. The PlantComp workshop serves as the meeting point for our interdisciplinary network.